Jędrzej Łukasiewicz – Adiunkt w Zakładzie Lotnictwa na Wydziale Inżynierii Lądowej i Transportu Politechniki Poznańskiej
Wobec wymagań stawianych przed producentami energii elektrycznej przez normy zanieczyszczenia powietrza atmosferycznego i wobec rosnącego popytu na energię elektryczną, rządzący państwami coraz częściej spoglądają na czyste źródła energii. Do takich czystych źródeł należy energetyka wiatrowa. Morska energetyka wiatrowa jest jednym z najszybciej rozwijających się sektorów produkcji energii. W Polsce za budowę farm wiatrowych odpowiada firma PGE Polska Grupa Energetyczna SA. ze wsparciem merytorycznym PGE Baltica. Obecnie, ze względu na odpowiednie warunki wiatrowe, planuje się budowę farm w polskiej strefie ekonomicznej na Bałtyku.
Jak podaje PGE Baltica na swoich stronach internetowych, planowane inwestycje dostarczą użytkownikom w Polsce energię elektryczną o mocy 1 045 MW do 2026 roku oraz do 1 498 MW do 2030 roku. Farma wiatrowa, jako źródło energii, może zostać zgodnie z ustawą wpisana na listę obiektów infrastruktury krytycznej. Obiekt taki jako obiekt o kluczowym znaczeniu dla gospodarki musi być chroniony we właściwy sposób, który będzie wynikał z analizy ryzyka.
Analizę ryzyka dla obiektów morskich farm wiatrowych należy przeprowadzić zgodnie ze znanym schematem, a wartość ryzyka można obliczyć korzystając z równania:
R = PA x PS x C
gdzie:
R – to wartość ryzyka, akceptowalna/tolerowana/nieakceptowalna,
PA – jest prawdopodobieństwem ataku na obiekt,
PS – jest prawdopodobieństwem, że atak zakończy się sukcesem,
C – jest konsekwencją ataku.
Zakładając, że 100%-owemu prawdopodobieństwu ataku przypiszemy wartość liczbową 1, a pewności, że atak nie nastąpi przypiszemy wartość 0 – to prawdopodobieństwo ataku będzie równe liczbie z przedziału 0-1. Zakładając także, że 100%-owemu prawdopodobieństwu, że atak zakończy się sukcesem przypiszemy wartość liczbową 1, a pewności, że atak zakończy się niepowodzeniem przypiszemy wartość liczbową 0. Prawdopodobieństwo, że atak zakończy się sukcesem atakującego będzie zatem równe liczbie z przedziału 0-1. Konsekwencjom ataku także można przypisać wartość liczbową z przedziału 0-1, przy czym wartość 0 będzie przypisana do konsekwencji minimalnych, a wartość 1 do konsekwencji maksymalnych. Po wymnożeniu wszystkich wyżej wymienionych wartości otrzymujemy wartość ryzyka R. W zależności od założeń, wartość ta wskaże czy ryzyko jest akceptowalne, tolerowane lub czy ryzyko jest nieakceptowalne i należy podjąć działania zmierzające do obniżenia jego wartości.
Określenie wartości prawdopodobieństwa ataku z użyciem bezzałogowego statku powietrznego jest zadaniem trudnym i powinno należeć do służb mających dostęp do informacji o aktywności terrorystycznej, mogącej zagrozić morskiej farmie wiatrowej. Możliwości kompetencyjnych umożliwiających przelot i dokonanie ataku osób prowadzących działalność terrorystyczną w artykule nie można ocenić z powodu braku danych, ale można przeanalizować techniczną możliwość przelotu bezzałogowego statku powietrznego z miejsca startu do celu, czyli do turbiny wiatrowej. Możliwości te będą oczywiście zależały od modelu bezzałogowego statku powietrznego, ale na potrzeby artykułu wybrano model DJI Phantom 4. Jest to multirotor, jeden z najczęściej kupowanych w Polsce i na świecie modeli bezzałogowców. Model ten charakteryzuje się maksymalną prędkością postępową, mierzoną względem powietrza, wynoszącą 72 km/h i masą wraz z pakietem litowo-polimerowym 1 370 g. Jest to zatem model lekki, podatny na podmuchy wiatru. Statek ten może unosić się w powietrzu w idealnych warunkach pogodowych, takich jak odpowiednia temperatura i brak wiatru, od około 20 minut do około 30 min. Dołożenie dodatkowego pakietu zasilającego nie zwiększa proporcjonalnie czasu lotu, ponieważ wraz ze zwiększeniem ilości energii zwiększa się, co oczywiste, masa statku powietrznego. Czas lotu skraca się w przypadku wykonywania misji przy temperaturach poniżej 15 stopni Celsjusza. Zużycie energii rośnie także radykalnie w przypadku lotu statku powietrznego pod wiatr lub w czasie lotu z wiatrem bocznym, co prowadzi do skrócenia możliwego czasu, w którym statek powietrzny utrzyma się w powietrzu. Warunki wiatrowe na Bałtyku południowym, zgodnie z danymi podanymi przez PGE Baltica, są dobre, a średnia prędkość wiatru jest wyraźnie wyższa niż 32 km/h. Oznacza to, że w przypadku wiatru przeciwnego do kierunku lotu bezzałogowca oraz przy założeniu, że leci on z prędkością maksymalną 72 km/h, to w czasie 30 minut przebędzie drogę o długości około 15 km od miejsca startu. Jeżeli zatem morska farma wiatrowa zostanie zbudowana w odległości większej niż 15 km od miejsca startu bezzałogowego statku powietrznego, to z technicznego punktu widzenia nie będzie możliwości, by typowy multirotor do takiej farmy doleciał. Być może, specjalnie skonstruowany, nietypowy multirotor, o dłuższym czasie lotu taką misję mógłby wykonać. Kolejną przeszkodą utrudniającą wykorzystanie bezzałogowego statku powietrznego jest problem zasięgu aparatury służącej do komunikacji pomiędzy pilotem a bezzałogwcem. Zasięg ten w warunkach idealnych, bez przeszkód terenowych, bez interferujących zakłóceń wynosi około 3.5 km. Po utracie łączności, statek powietrzny albo wykona procedurę FailSafe, zgodnie z którą może np. powrócić do miejsca startu albo polecieć dalej do celu jeśli pilot przed startem zaprogramował trasę. Pilot nie będzie miał jednak możliwości, by przy pomocy kamery precyzyjnie zbliżyć się do celu lotu. Powyższe rozważania wskazują, że sposób atakowania morskiej farmy wiatrowej za pomocą bezzałogowego statku powietrznego jest raczej mało prawdopodobny.
Określenie podatności turbiny wiatrowej na atak jest zagadnieniem z mechaniki i wytrzymałości materiałów. Zakładając, że bezzałogowiec o masie 1 370 g będzie poruszał się z prędkością 72 km/h, to energia uderzenia zgodnie ze wzorem: EK = ½ mV2, wyniesie 274 J. Zatem bezzałogowiec uderzy z energią o połowę mniejszą niż energia uderzenia pocisku z broni krótkiej, która wynosi około 500 J. Biorąc pod uwagę brak możliwości ręcznej kontroli położenia drona z dużej odległości, wysokość turbin wiatrowych, która może wynosić do 250 m od poziomu morza, długość łopat wirnika dochodząca do 110 metrów oraz fakt, że wirnik turbiny obraca się pod wpływem wiatru, można założyć, że prawdopodobieństwo trafienia dronem w element turbiny jest bardzo niskie. Trudność utrzymania bezzałogowca przy łopacie rotującego wirnika powoduje, że kontrola stanu technicznego turbin wiatrowych odbywa się przy nieobracającym się wirniku.
Konsekwencje skutecznego ataku można rozpatrywać z punktu widzenia strat finansowych dla operatora farmy. Uszkodzoną turbinę wiatrową trzeba naprawić lub wymienić. Koszt takiej operacji będzie zależny od skali zniszczeń. Wartość ryzyka obliczona dla małego prawdopodobieństwa ataku i małego prawdopodobieństwa sukcesu ataku będzie zatem niska, a więc tolerowana lub akceptowalna.
Powyższe rozważania jasno pokazują, że typowe bezzałogowce kupione w sklepie nie stanowią zagrożenia dla farm wiatrowych. Niestety, łatwy dostęp do elementów służących do budowy takiego bezzałogowego statku powietrznego pozwala przypuszczać, że użycie nietypowej konstrukcji, o większej masie, o większym udźwigu, o lepszych właściwościach lotnych, pozwalającego na przeniesienie ładunku wybuchowego w rejon turbiny wiatrowej może skutkować przeprowadzeniem ataku, którego skuteczność będzie bardzo wysoka. Konsekwencje takiego ataku będą wysokie i zależne od wielkości ładunku wybuchowego przenoszonego przez statek powietrzny.
BEZZAŁOGOWE STATKI POWIETRZNE JAKO POTENCJALNE ZAGROŻENIE DLA MORSKICH FARM WIATROWYCH
Bezzałogowe statki powietrzne wykonują loty na podstawie poleceń wydawanych drogą radiową przez pilota lub na podstawie algorytmu działania zaprogramowanego przez pilota przed startem. Do bezzałogowych statków powietrznych zaliczamy statki typu: multirotor (MR), samolot (A), śmigłowiec (H) oraz aerostat (AS). Ze względu na łatwość pilotażu, najczęściej spotykanym typem bezzałogowego statku powietrznego jest multirotor. Drugim pod względem łatwości pilotażu, najczęściej spotykanym statkiem powietrznym, jest samolot. Konstrukcje obu tych typów statków mają swoje zalety i wady. Do zalet multirotorów niewątpliwie można zaliczyć możliwość nieruchomego zawisu w przestrzeni powietrznej, w miejscu wybranym przez pilota. Zaletą multirotorów są także: niewielki rozmiar, łatwość ich transportu oraz niewielkie wymagania dotyczące miejsca startu i lądowania. Do wad statków powietrznych typu multirotor zaliczamy stosunkowo niewielki zasięg przelotu, wynikający z ograniczeń pojemności pakietu litowo-polimerowego stanowiącego źródło energii elektrycznej służącej do zasilania urządzeń pokładowych i silników oraz niewielką prędkość przelotu.
Drugim najczęściej spotykanym typem bezzałogowego statku powietrznego jest samolot. Zaletą samolotu jest możliwość wykonania lotu na długim dystansie, z dużą prędkością i utrzymywanie się w powietrzu w długim okresie czasu. Wadą tego typu konstrukcji jest brak możliwości nieruchomego zawisu w jednym punkcie przestrzeni powietrznej. Ostatnio pojawiły się hybrydy multirotorów i samolotów, pozwalające na pionowy start samolotu, ale należy pamiętać, że konstrukcje takie nie są powszechnie spotykane. Bezzałogowe śmigłowce oraz aerostaty są konstukcjami stosunkowo rzadko spotykanymi.
Bezzałogowe statki powietrzne wykorzystywane są coraz częściej w różnych obszarach działalności człowieka. O ich wykorzystaniu decydują takie czynniki jak: niska cena bezzałogowego statku powietrznego w porównaniu z załogowym statkiem powietrznym, uniwersalność platformy latającej pozwalająca na umieszczenie na niej dowolnego, wymaganego w danej chwili ładunku, w tym urządzenia technicznego, krótki czas nauki pilotażu lub zastosowanie komputera pokładowego, który samodzielnie ustabilizuje bezzałogową platformę w locie i wykona zaprogramowaną wcześniej misję.
Doniesienia prasowe wskazują, że bezzałogowe statki powietrzne mogą być źródłem zagrożeń dla człowieka lub dla instalacji mających kluczowe znaczenie dla funkcjonowania społeczeństwa i gospodarki. Jako przykład ataku zrealizowanego za pomocą bezzałogowego statku powietrznego można wskazać atak, przeprowadzony 4 sierpnia 2018 roku w stolicy Wenezueli – Caracas, na prezydenta tego kraju Nicolása Maduro. Zamach polegał na detonacji granatów przymocowanych do lecących w pobliżu polityka dronów. Politykowi nic się nie stało, ale w wyniku detonacji granatów rannych zostało kilku żołnierzy z ochrony. Zamach wywołał także wybuch paniki w zgromadzonym tłumie. Także ataki z 23 stycznia 2021 roku na Al Yamamah Palace w Rijadzie, będący oficjalną siedzibą króla Arabi Saudyjskiej zostały przeprowadzone z użyciem bezzałogowych statków powietrznych, przenoszących ładunki wybuchowe. Ataki te wywołały napięcia polityczne w regionie.
Przykładem ataku, zrealizowanego za pomocą bezzałogowego statku powietrznego na instalacje lub obiekty mające kluczowe znaczenie dla funkcjonowania gospodarki, był atak z 14 sierpnia 2019 roku na saudyjskie instalacje naftowe Abqaiq. Atak został zrealizowany za pomocą, prawdopodobnie, 18 platform bezzałogowych. W wyniku uszkodzenia instalacji spadła produkcja ropy. Jako inny przykład ataku na obiekty można wskazać atak przeprowadzony w dniach 19-21 grudnia 2018 roku na lotnisko Gatwick w Wielkiej Brytanii. Atak polegał na przelotach bezzałogowca w pobliżu lotniska i spowodował paraliż lotniska. Straty finansowe, wynikające z konieczności zwrotu opłat za bilety oraz zapewnienia opieki pasażerom, zostały ocenione na około 50 milionów funtów brytyjskich.
SEKWENCJA ZDARZEŃ W CZASIE ATAKU Z UŻYCIEM BEZZAŁOGOWEGO STATKU POWIETRZNEGO
Sekwencję zdarzeń ataku na dowolny obiekt infrastruktury krytycznej z użyciem bezzałogowej platformy można przedstawić w postaci schematu:
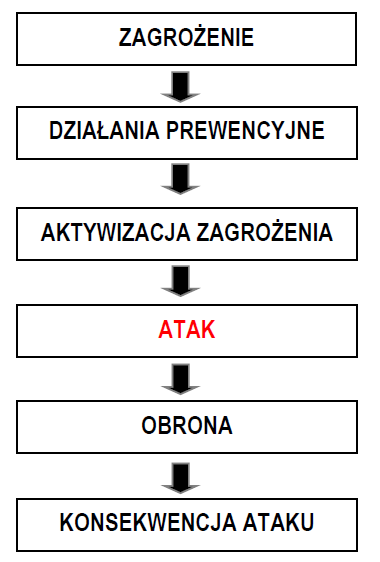
Zagrożeniem jest w tym przypadku możliwość działania pilota przy użyciu bezzałogowego statku powietrznego, mającego na celu przeprowadzenie ataku na człowieka lub obiekt.
Działania prewencyjne to wszelkie działania, w tym prawne, mające na celu zniechęcenia atakującego do rozpoczęcia ataku. Do działań prewencyjnych należą z pewnością działania mające na celu ustanowienie, zgodnie z obowiązującymi przepisami prawa lotniczego, tzw. stref geograficznych, w których będzie obowiązywał zakaz wykonywania lotów bezzałogowymi statkami powietrznymi innymi niż należącymi do operatora obiektu infrastruktury krytycznej. Do działań prewencyjnych można także zaliczyć podnoszenie świadomości lokalnej społeczności o ograniczeniach i zakazach wykonywania lotów bezzałogowcami oraz podnoszenie stopnia znajomości prawa lotniczego lokalnych jednostek policji.
Aktywizacja zagrożenia to uruchomienie bezzałogowca i rozpoczęcie ataku.
Atak to zdarzenie niepożądane, które może spowodować stratę.
Obrona to wszelkie działania mające na celu przeszkodzenie atakującemu w kontynuacji jego działań. Do obrony przed atakiem realizowanym za pomocą platform bezzałogowych służą systemy złożone z urządzeń wykrywających i urządzeń niszczących lub zakłócających lot. Urządzenia wykrywające to najczęściej radary, zestawy mikrofonów rejestrujących hałas emitowany przez bezzałogowca, kamery działające w paśmie widzialnym i/lub podczerwieni promieniowania elektromagnetycznego, służące do obserwacji przestrzeni powietrznej nad obiektem i umożliwiające identyfikację za pomocą algorytmów AI lecącego obiektu innego niż ptak. Lecącego bezzałogowca można także wykryć przez analizę sygnału komunikacji pomiędzy urządzeniem sterującym, będącym w ręku pilota a statkiem powietrznym. Niestety, każde z tych urządzeń można oszukać, a osoba mająca elementarne pojęcie o zasadach działania statków powietrznych i o fizyce nie będzie miała z tym żadnego problemu. Każda z wyżej opisanych metod detekcji ma także swoje ograniczenia, na przykład wynikające z położenia chronionego obiektu. Dla przykładu – zakładając, że obiekt infrastruktury leży w obszarze dużego miasta, w sąsiedztwie innych zabudowań, w rejonie ulic o dużym natężeniu ruchu, można zadać pytania: na jakiej minimalnej wysokości system radarowy wykryje drona? Bezzałogowy statek powietrzny może lecieć na wysokości około 0,5 metra nad powierzchnią ulicy, wykorzystując lidarowy miernik wysokości. Jaki hałas, którego źródłem będą rotujące silniki bezzałogowca wykryje mikrofon, jeśli w rejonie, w którym leci bezzałogowiec znajdują się inne źródła hałasu o dużo wyższym natężeniu i charakterystyce częstotliwościowej zbliżonej do charakterystyki drona? Takimi źródłami mogą być samochody i tramwaje. Jak wykryje drona kamera, jeśli bezzałogowiec ten zostanie tak skonstruowany, by swoim kształtem oraz umalowaniem przypominał lecącego ptaka, a jego elementy zostaną zaizolowane cieplnie? Należy także zapytać jaki sygnał komunikacji zarejestruje skaner, jeśli trasa bezzałogowca zostanie przez pilota zaprogramowana przed startem i bezzałogowiec wykona swoją misję całkowicie autonomicznie? W trybie lotu autonomicznego, bezzałogowiec może nie emitować sygnału komunikacji, a działać wyłącznie jako pasywny odbiornik sygnałów np. GPS. Systemy detekcji dronów obecnie oferowane na rynku są zatem systemami, których użycie obarczone jest ograniczeniami i działającymi skutecznie w przypadku bezzałogowców standardowych, tych łatwo dostępnych na półkach sklepowych. Dużym wyzwaniem technologicznym oraz prawnym jest także sposób neutralizacji wykrytego bezzałogowca, stanowiącego zagrożenie. Do najczęściej stosowanych metod należą metody oparte na fizycznym przechwyceniu drona, np. przez złapanie go w siatkę plątającą śmigła, zakłócenie sygnału komunikacji pilot – bezzałogowiec, fizycznym uszkodzeniu przy wykorzystaniu promieniowania laserowego o dużej mocy, zakłóceniu sygnału pozycjonowania GPS. Metody te będą skuteczne tylko w przypadku pojedynczego drona, w przypadku gdy przechwycenie odbywa się na terenie, w którym nie ma ludzi i upadek drona na ziemię nie stanowi zagrożenia i nie spowoduje dużych strat materialnych. Potencjalne konsekwencje w postaci obrażeń doznanych przez człowieka lub zniszczeń chronionego obiektu przez upadającą platformę bezzałogową mogłyby być duże.
Za konsekwencje skutecznego ataku można uznać znaczące straty finansowe, straty ekologiczne w przypadku spowodowania kontaminacji terenu, straty polityczne polegające np. na utracie zaufania do personelu ochrony, służb, władz państwa i straty społeczne w przypadku śmierci człowieka.
WNIOSKI
- Przed nieautoryzowanym zbliżeniem się bezzałogowego statku powietrznego, pilotowanego przez nieświadomego operatora należy się zabezpieczyć poprzez ustanowienie strefy zakazu lotów dla bezzałogowych statków powietrznych w rejonie farmy. Takie strefy wyznacza, na żądanie operatora chronionej instalacji, Polska Agencja Żeglugi Powietrznej,
- Należy ustanowić strefy z zakazem lotów bezzałogowych statków powietrznych wzdłuż linii brzegowej morza Bałtyckiego na odcinku bezpośrednio przylegającym do miejsca budowy farmy. Wraz z tymi działaniami należy podnieść świadomość prawną w zakresie prawa lotniczego funkcjonariuszy policji odpowiedzialnych za patrolowanie rejonu zakazu lotów.
- Otwarta przestrzeń pomiędzy linią brzegową a farmą wiatrową umożliwia stosowanie systemów radarowych, służących do wykrycia nieautoryzowanych przelotów bezzałogowych statków powietrznych, a zastosowanie urządzeń zakłócających lot lub niszczących drona nie będzie stanowiło zagrożenia dla ludzi i ewentualnie chronionej instalacji.
- Powyższe rozważania dotyczą sytuacji, w której potencjalny atak wyprowadzony zostanie od strony lądu. Atak prowadzony przy użyciu drona startującego z jednostki pływającej, która może zbliżyć się do rejonu budowy farmy, może okazać się dużo bardziej skuteczny i tym samym spowodować wyższe straty.
- Nienajlepszy stan polskiej Marynarki Wojennej powinien być powodem rozpoczęcia prac nad bezzałogowymi okrętami patrolowymi, o niewielkiej wyporności, ale zaopatrzonymi w systemy radarowe i systemy zwalczania dronów. Okręty takie mogłyby bronić instalacji od strony morza.
- Budowa morskich farm wiatrowych powinna być impulsem do budowy systemu nasłuchowego, złożonego z systemu mikrofonów, chroniącego farmę przed zagrożeniami, których źródłem mogą być podwodne drony.